|
| def | __init__ (self, *args) |
| |
| def | __call__ (self, *args) |
| |
| def | __imul__ (self, *args) |
| |
| def | __mul__ (self, *args) |
| |
| def | identity () |
| |
| def | orthographic (left, right, top, bottom, near, far) |
| |
| def | perspective (angle, near, far, aspect) |
| |
| def | rotateX (deg) |
| |
| def | rotateY (deg) |
| |
| def | rotateZ (deg) |
| |
| def | scale (x, y, z) |
| |
| def | translate (self, x, y, z) |
| |
| def | __eq__ (self, B) |
| |
| def | __ne__ (self, B) |
| |
| def | __iadd__ (self, B) |
| |
| def | __add__ (self, B) |
| |
| def | __isub__ (self, B) |
| |
| def | __sub__ (self, B) |
| |
| def | rows (self) |
| |
| def | columns (self) |
| |
| def | initialize (self, rows, columns, a=None) |
| |
|
| | thisown = _swig_property(lambda x: x.this.own(), lambda x, v: x.this.own(v), doc='The membership flag') |
| |
| | identity = staticmethod(identity) |
| |
| | orthographic = staticmethod(orthographic) |
| |
| | perspective = staticmethod(perspective) |
| |
| | rotateX = staticmethod(rotateX) |
| |
| | rotateY = staticmethod(rotateY) |
| |
| | rotateZ = staticmethod(rotateZ) |
| |
| | scale = staticmethod(scale) |
| |
| | translate |
| |
| | thisown = _swig_property(lambda x: x.this.own(), lambda x, v: x.this.own(v), doc='The membership flag') |
| |
| | NullMatrix = _enigma.eSquareMatrix_NullMatrix |
| |
| | IdentityMatrix = _enigma.eSquareMatrix_IdentityMatrix |
| |
| | thisown = _swig_property(lambda x: x.this.own(), lambda x, v: x.this.own(v), doc='The membership flag') |
| |
◆ __init__()
| def enigma.eMatrix4x4.__init__ |
( |
|
self, |
|
|
* |
args |
|
) |
| |
__init__(eMatrix4x4 self, enum eSquareMatrix::MatrixType type) -> eMatrix4x4
__init__(eMatrix4x4 self) -> eMatrix4x4
__init__(eMatrix4x4 self, eMatrix B) -> eMatrix4x4
Reimplemented from enigma.eSquareMatrix.
◆ __call__()
| def enigma.eMatrix4x4.__call__ |
( |
|
self, |
|
|
* |
args |
|
) |
| |
__call__(eMatrix4x4 self, unsigned int i, unsigned int j) -> float
__call__(eMatrix4x4 self, unsigned int i, unsigned int j) -> float const &
Reimplemented from enigma.eMatrix.
◆ __imul__()
| def enigma.eMatrix4x4.__imul__ |
( |
|
self, |
|
|
* |
args |
|
) |
| |
__imul__(eMatrix4x4 self, eMatrix4x4 B) -> eMatrix4x4
__imul__(eMatrix4x4 self, float scalar) -> eMatrix4x4
Reimplemented from enigma.eMatrix.
◆ __mul__()
| def enigma.eMatrix4x4.__mul__ |
( |
|
self, |
|
|
* |
args |
|
) |
| |
__mul__(eMatrix4x4 self, eMatrix4x4 B) -> eMatrix4x4
__mul__(eMatrix4x4 self, float scalar) -> eMatrix4x4
Reimplemented from enigma.eMatrix.
◆ identity()
| def enigma.eMatrix4x4.identity |
( |
| ) |
|
◆ orthographic()
| def enigma.eMatrix4x4.orthographic |
( |
|
left, |
|
|
|
right, |
|
|
|
top, |
|
|
|
bottom, |
|
|
|
near, |
|
|
|
far |
|
) |
| |
orthographic(float left, float right, float top, float bottom, float near, float far) -> eMatrix4x4
◆ perspective()
| def enigma.eMatrix4x4.perspective |
( |
|
angle, |
|
|
|
near, |
|
|
|
far, |
|
|
|
aspect |
|
) |
| |
perspective(float angle, float near, float far, float aspect) -> eMatrix4x4
◆ rotateX()
| def enigma.eMatrix4x4.rotateX |
( |
|
deg | ) |
|
rotateX(float deg) -> eMatrix4x4
◆ rotateY()
| def enigma.eMatrix4x4.rotateY |
( |
|
deg | ) |
|
rotateY(float deg) -> eMatrix4x4
◆ rotateZ()
| def enigma.eMatrix4x4.rotateZ |
( |
|
deg | ) |
|
rotateZ(float deg) -> eMatrix4x4
◆ scale()
| def enigma.eMatrix4x4.scale |
( |
|
x, |
|
|
|
y, |
|
|
|
z |
|
) |
| |
scale(float x, float y, float z) -> eMatrix4x4
◆ translate()
| def enigma.eMatrix4x4.translate |
( |
|
self, |
|
|
|
x, |
|
|
|
y, |
|
|
|
z |
|
) |
| |
translate(eMatrix4x4 self, float x, float y, float z) -> eMatrix4x4
◆ identity
| enigma.eMatrix4x4.identity = staticmethod(identity) |
|
static |
◆ orthographic
| enigma.eMatrix4x4.orthographic = staticmethod(orthographic) |
|
static |
◆ perspective
| enigma.eMatrix4x4.perspective = staticmethod(perspective) |
|
static |
◆ rotateX
| enigma.eMatrix4x4.rotateX = staticmethod(rotateX) |
|
static |
◆ rotateY
| enigma.eMatrix4x4.rotateY = staticmethod(rotateY) |
|
static |
◆ rotateZ
| enigma.eMatrix4x4.rotateZ = staticmethod(rotateZ) |
|
static |
◆ scale
| enigma.eMatrix4x4.scale = staticmethod(scale) |
|
static |
◆ thisown
| enigma.eMatrix4x4.thisown = _swig_property(lambda x: x.this.own(), lambda x, v: x.this.own(v), doc='The membership flag') |
|
static |
◆ translate
| enigma.eMatrix4x4.translate |
|
static |
The documentation for this class was generated from the following file:
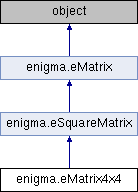
 Public Member Functions inherited from enigma.eMatrix
Public Member Functions inherited from enigma.eMatrix